Preemptive Priority-Based Scheduling
Of the two scheduling algorithms introduced here, most real-time kernels use preemptive priority-based scheduling by default. As shown in Figure 4.4 with this type of scheduling, the task that gets to run at any point is the task with the highest priority among all other tasks ready to run in the system.
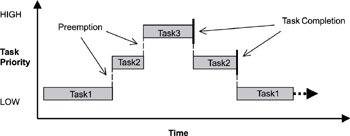
Figure 4.4: Preemptive priority-based scheduling.
Real-time kernels generally support 256 priority levels, in which 0 is the highest and 255 the lowest. Some kernels appoint the priorities in reverse order, where 255 is the highest and 0 the lowest. Regardless, the concepts are basically the same. With a preemptive priority-based scheduler, each task has a priority, and the highest-priority task runs first. If a task with a priority higher than the current task becomes ready to run, the kernel immediately saves the current task’s context in its TCB and switches to the higher-priority task. As shown in Figure 4.4 task 1 is preempted by higher-priority task 2, which is then preempted by task 3. When task 3 completes, task 2 resumes; likewise, when task 2 completes, task 1 resumes.
Although tasks are assigned a priority when they are created, a task’s priority can be changed dynamically using kernel-provided calls. The ability to change task priorities dynamically allows an embedded application the flexibility to adjust to external events as they occur, creating a true real-time, responsive system. Note, however, that misuse of this capability can lead to priority inversions, deadlock, and eventual system failure.